The Connected and Autonomous Vehicles Laboratory is an advanced research and development infrastructure established to develop, test, and validate next-generation intelligent mobility technologies. The laboratory provides an integrated simulation and testing ecosystem for the development of autonomous driving algorithms, vehicle communication systems (V2X), sensor fusion technologies, artificial intelligence–based decision systems, and vehicle control software. Within this framework, the laboratory enables end-to-end verification using Model-in-the-Loop (MIL), Software-in-the-Loop (SIL), Hardware-in-the-Loop (HIL), and real vehicle testing environments.
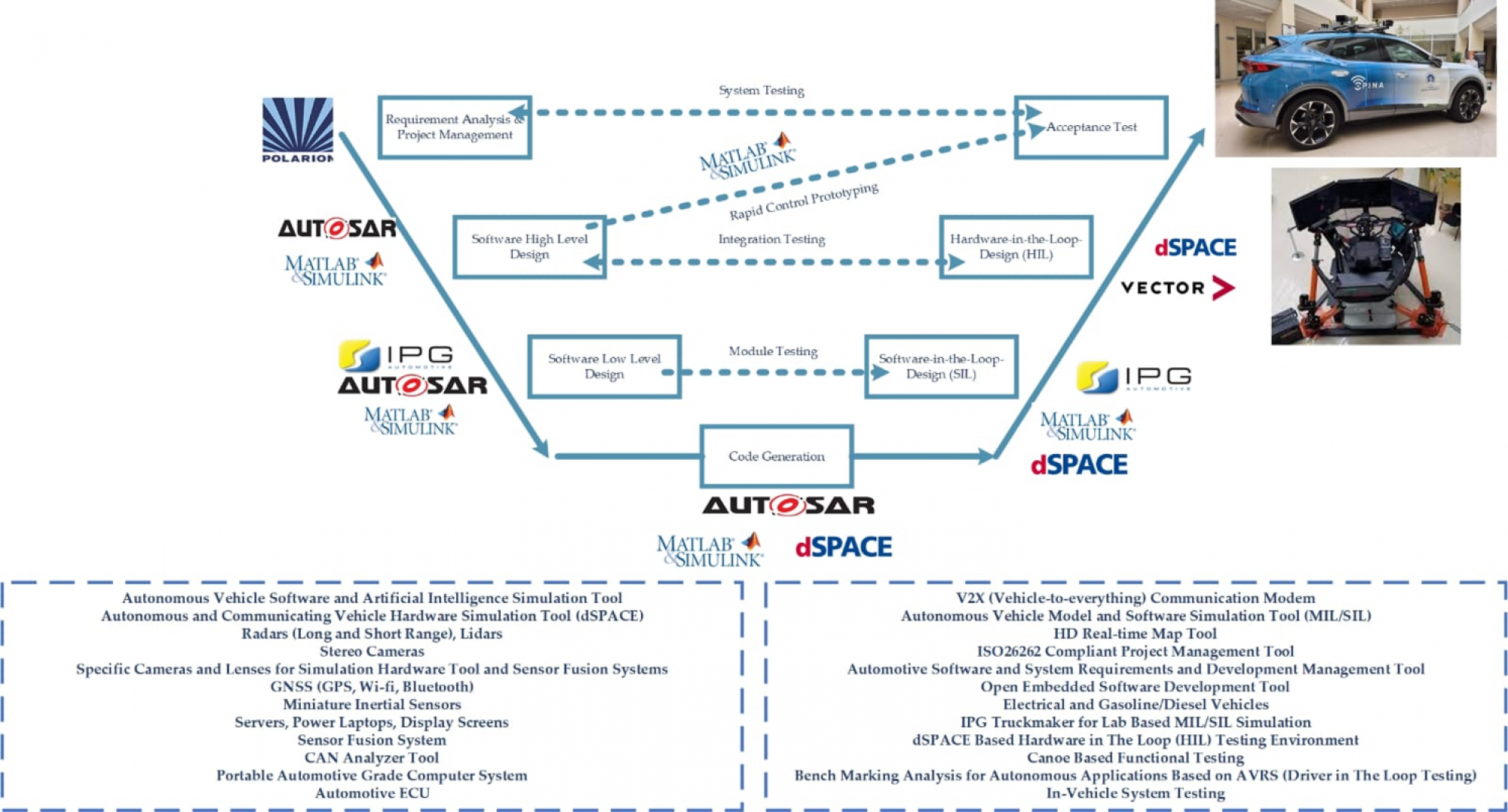
The laboratory infrastructure is built upon industry-standard engineering platforms such as MATLAB/Simulink-based modeling environments, AUTOSAR-compliant embedded software development frameworks, IPG Automotive simulation platforms, dSPACE real-time testing systems, and Vector vehicle communication analysis tools. This architecture allows vehicle functions to be developed and validated following the V-model development methodology, which is widely adopted in the automotive industry. In this process, algorithms are initially validated in simulation environments and subsequently verified through hardware integration and real-time testing platforms.
The laboratory’s sensing infrastructure includes critical components for autonomous driving applications such as long- and short-range radars, stereo cameras, GNSS positioning systems, inertial measurement sensors, and sensor fusion systems. In addition, CAN analysis tools, automotive-grade ECUs, real-time data processing systems, and high-performance computing infrastructure enable detailed analysis of in-vehicle communication networks and control algorithms.
Within the scope of connected vehicle technologies, the laboratory integrates Vehicle-to-Everything (V2X) communication systems and high-definition real-time mapping tools, enabling the testing of intelligent transportation scenarios in which vehicles interact with surrounding infrastructure and digital environments. Furthermore, driver-in-the-loop simulations, laboratory-based vehicle model simulations, and in-vehicle system testing enable comprehensive safety, performance, and reliability assessments of autonomous driving functions.
The laboratory is designed as a collaborative research platform connecting academia, industry, and public institutions. It provides an advanced experimentation environment for validating autonomous driving algorithms, testing emerging mobility solutions, and developing intelligent transportation systems in collaboration with automotive manufacturers, technology companies, and research institutions. Additionally, the laboratory serves as a critical infrastructure for graduate research, engineering education, and industry-driven innovation projects.
The Connected and Autonomous Vehicles Laboratory is positioned as an integrated innovation platform that combines simulation, hardware integration, and real-world vehicle testing to support the development of safe and reliable autonomous mobility technologies of the future.